Research Spotlights
Breakthroughs in the field of neuromuscular control through novel qunatum sensors?
The ERC-AdG project qMOTION combines our expertise in computational methods and novel quantum sensors to obtain new insights on human motion. Find out more
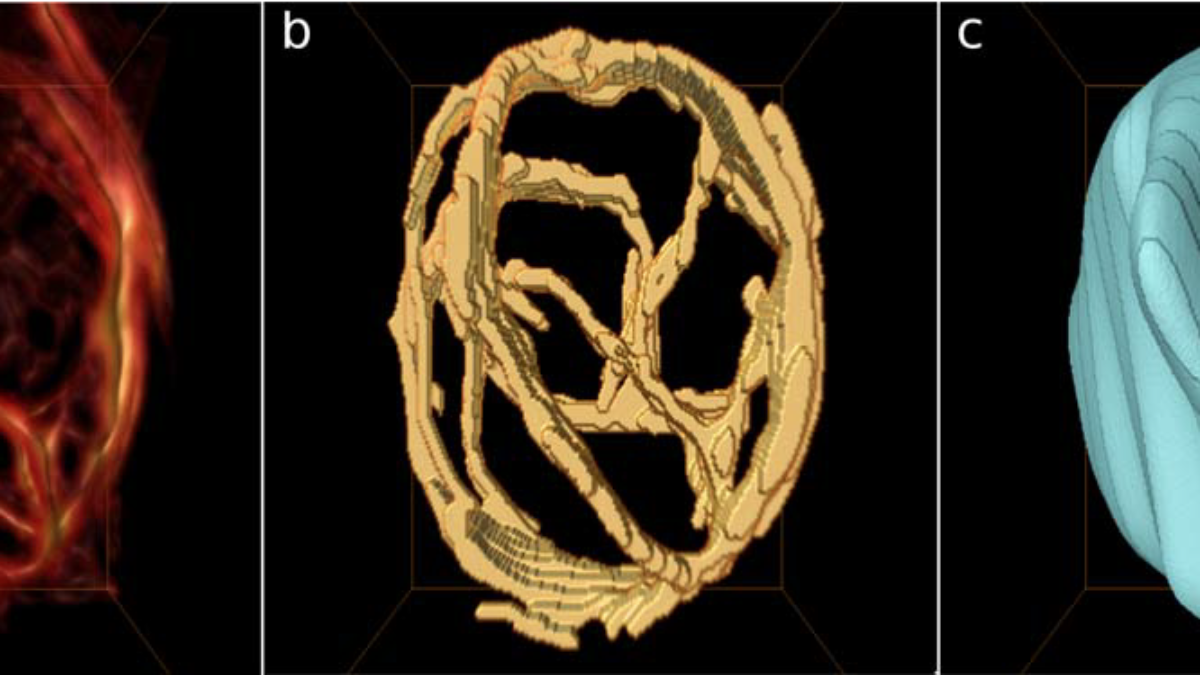
Relating the function of single cells and the behaviour of whole muscles
Multi-scale and multi-physics models allow insights into the behaviour of muscles that would not be feasible experimentally. Find out more
Relating structure and function of biomechanical systems
Combing AI and continuum mechanics to predict the stiffness of protein networks. Find out more

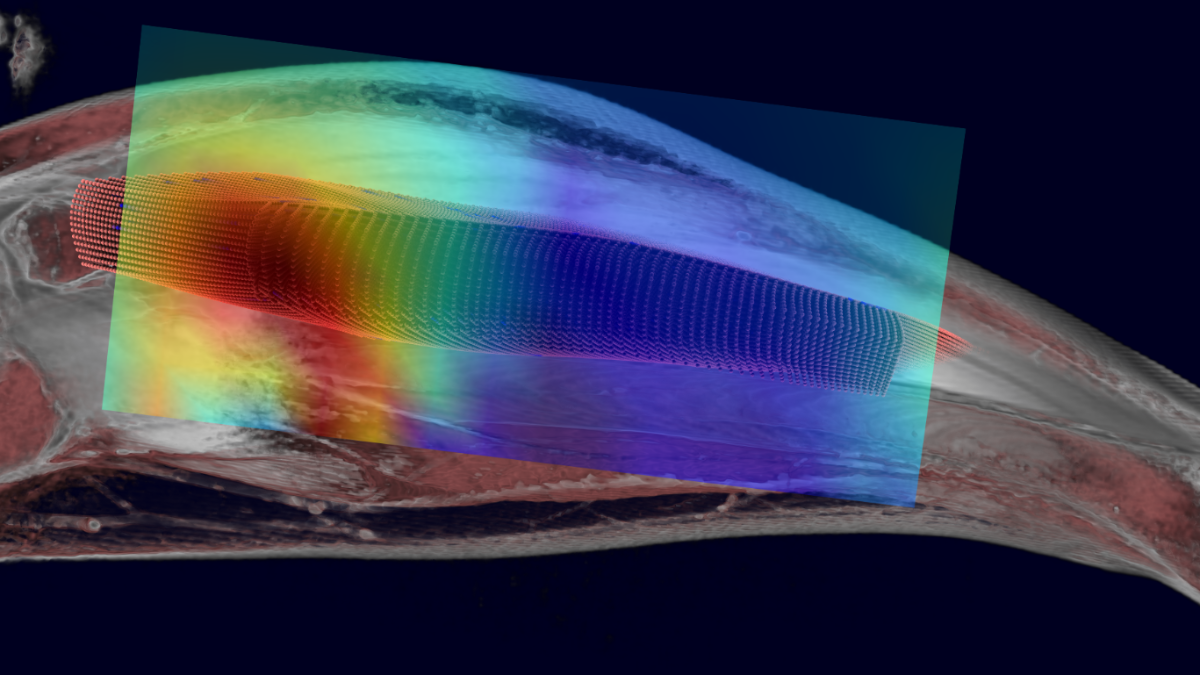
New insights on the structure and function of muscles using 3D ultrasound
We have developed a novel, fully automated 3D ultrasound device to study muscles during motions. Find out more
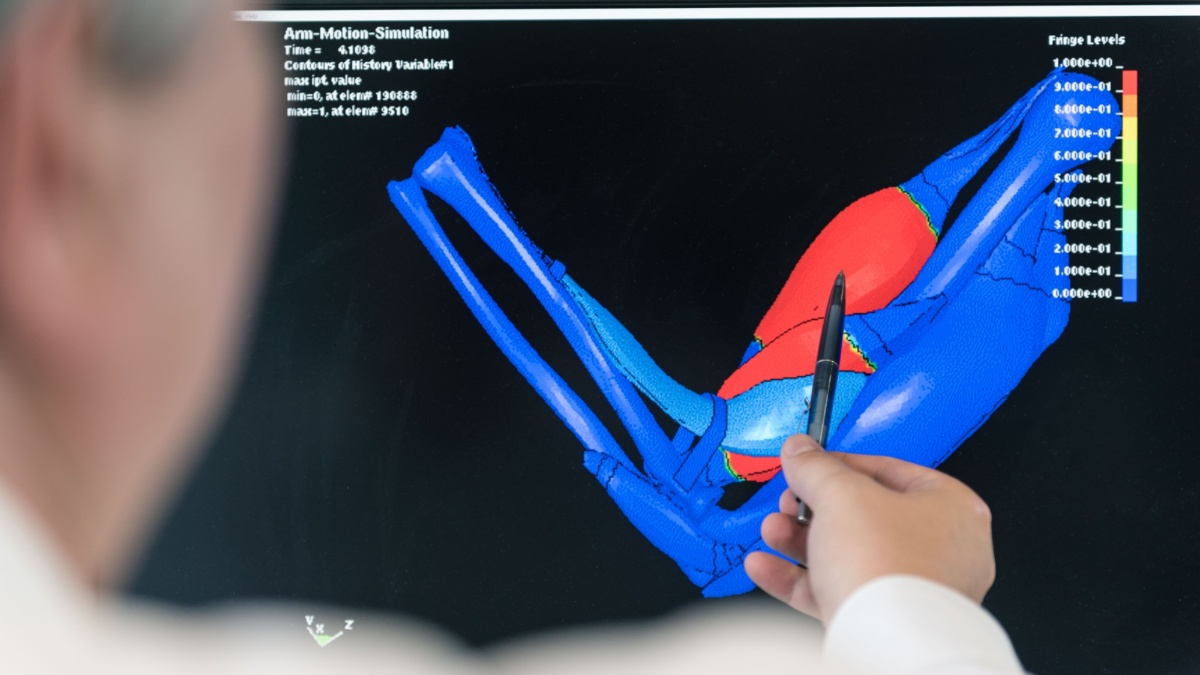
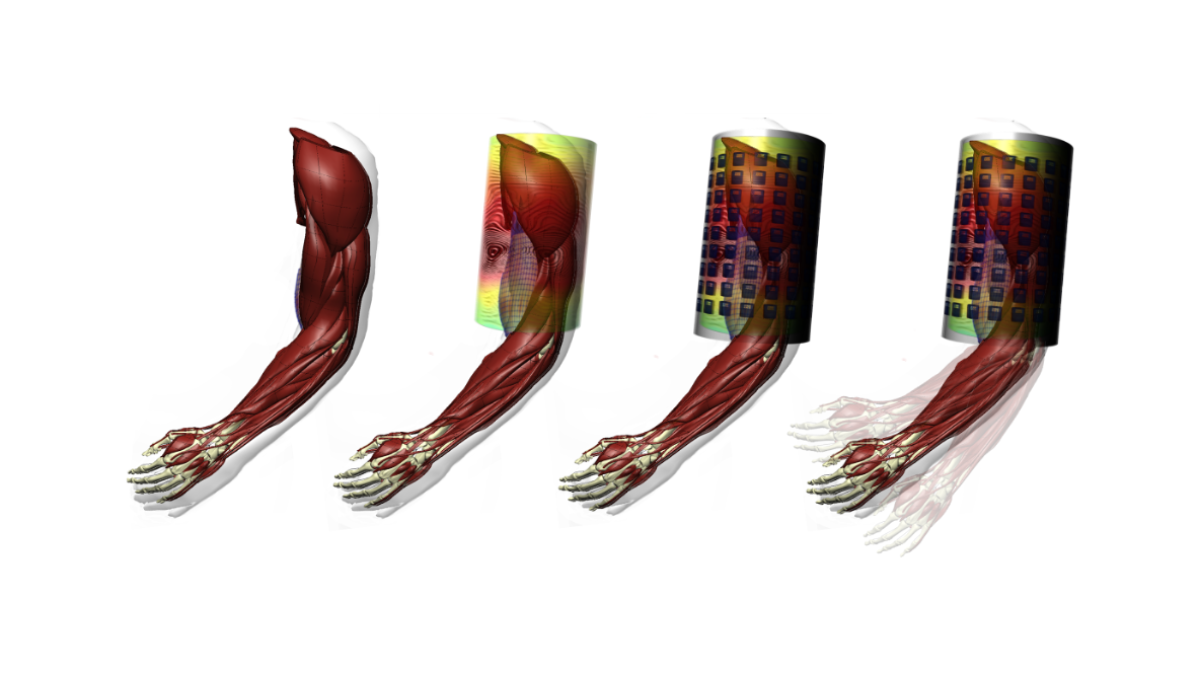
The world's first fully 3D musculoskeletal system model
In contrast to state-of-the-art musculoskeletal system models representing muscles as lumped 1D structures, 3D continuum mechanical models resolve the complete anatomy of the human body. Find out more

Simulation-assisted planing of medical interventions
To assist the treatment of osteoporosis, we develop novel models that allow clinicians to test quantitatively the outcome of vertebroplasty, i.e., stabilizing bones by injecting bone cement. Find out more




Vera Tahedl
Administrative Associate (Röhrle group)

Sina Schorndorfer
Project Coordinator