Impressionen
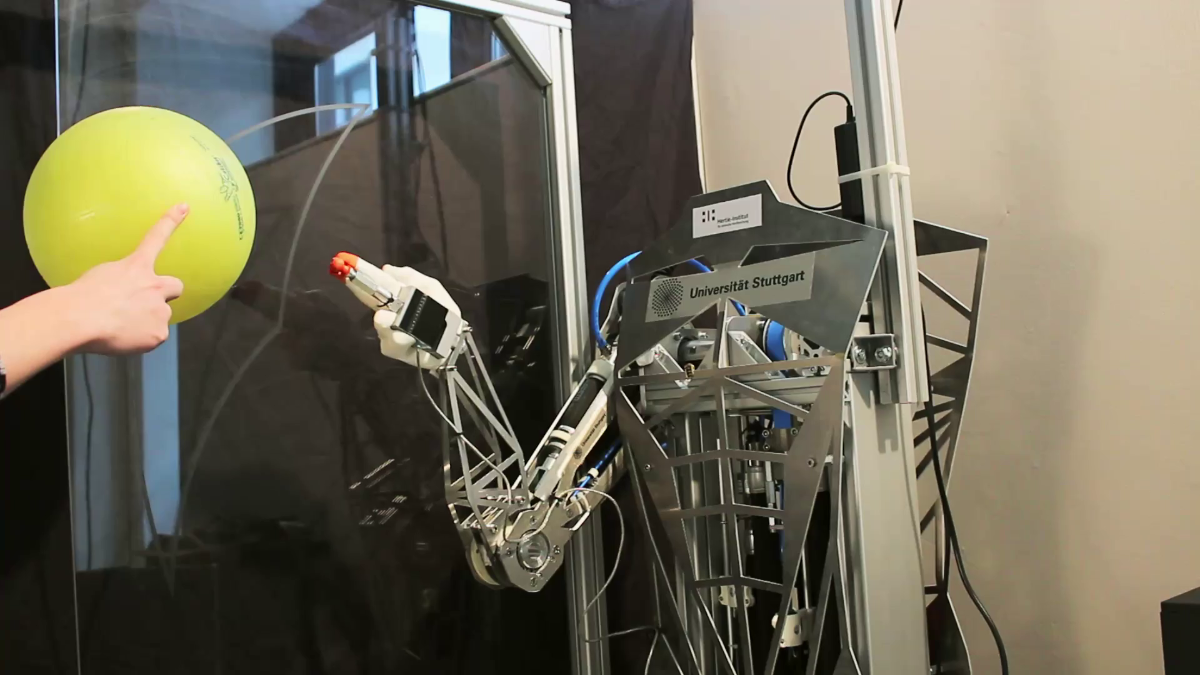
A combination of feedback and feedforward control is used to stimulate the musculo-skeletal robotic system.
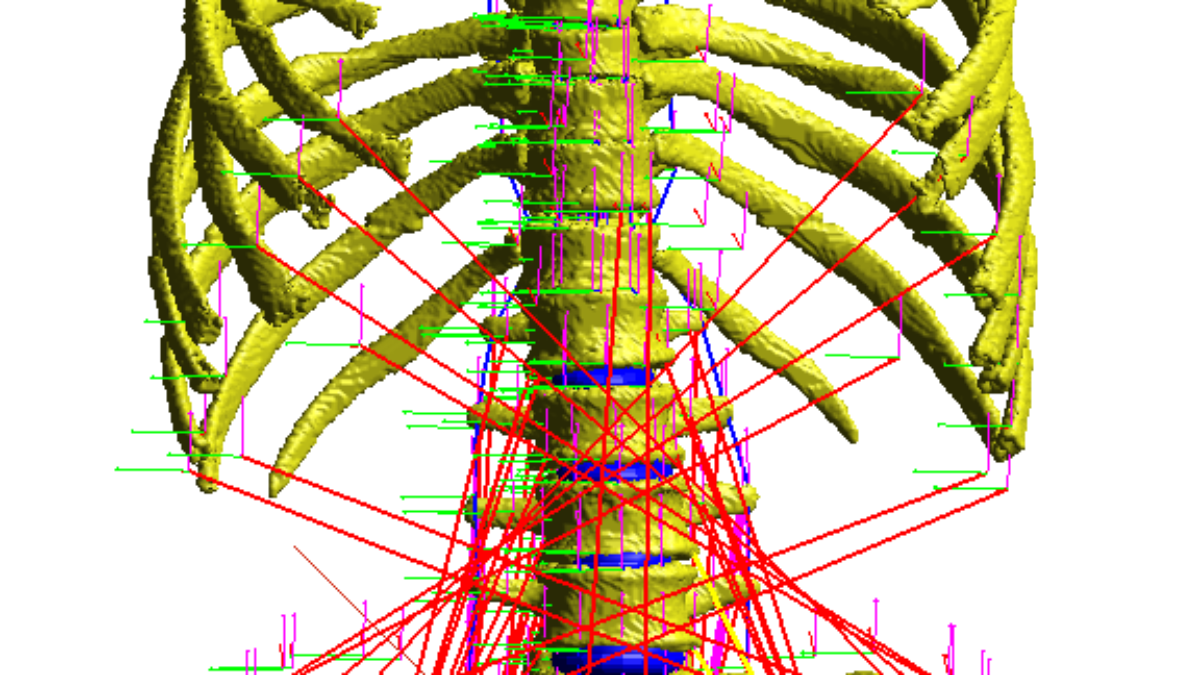
Patient-specific modelling of the whole spine is integrated to account for the multi-muscle activation of the trunk.
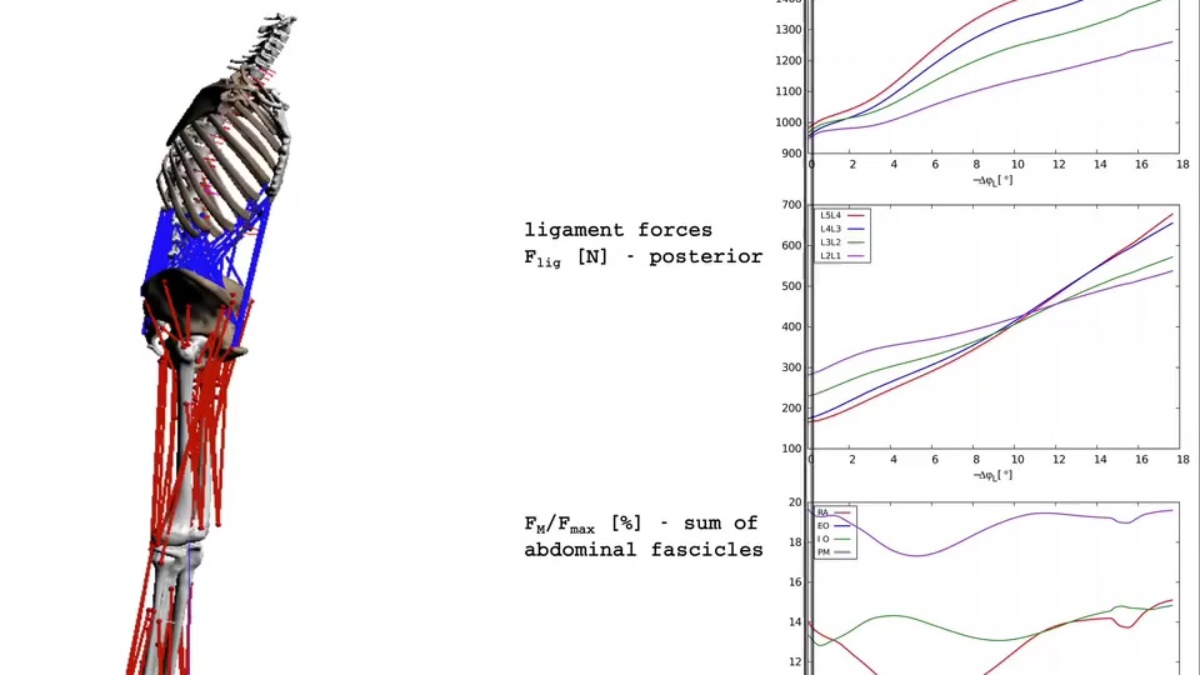
Whole human body simulation to predict the load sharing of relevant mechanical elements such as the intervertebral disc, ligaments, and muscles.
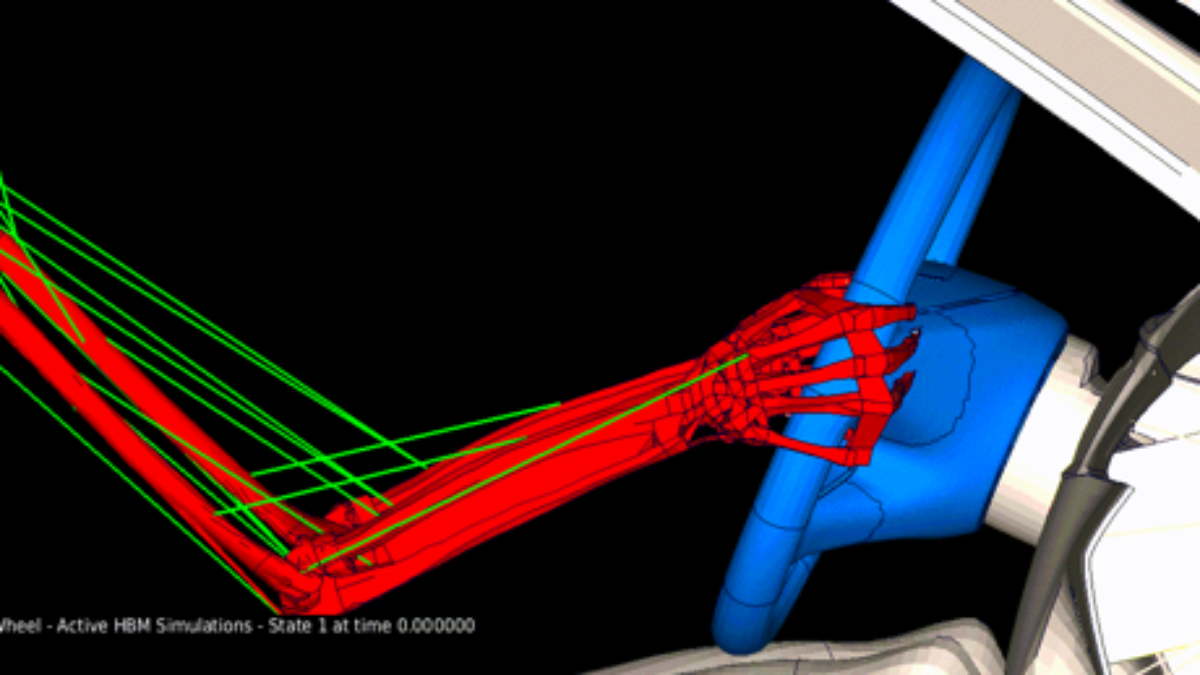
Active movement simulation in the pre-crash phase enhances the validity of accident research in the transportation sector.

Running on ground is a daily task that imposes shocks onto the musculo-skeletal system.
Forschungsbereiche
Es gibt heute keine zuverlässigen Methoden, die eine in vivo und in motu Messung der Belastungen in den inneren Strukturen des menschlichen Körpers ermöglichen. Dies liegt daran, dass die Implantation von Sensoren in den allermeisten denkbaren Fällen sowohl ethisch inakzeptabel als auch viel zu hinderlich ist, um die natürliche Bewegung nicht zu stören. Daher ist eine prädiktive biomechanische Modellierung erforderlich, um die internen Belastungen abzuschätzen.
Wir verwenden in diesem Forschungszweig eine breite Palette klassischer biomechanischer Methoden und Ansätze. Der Schwerpunkt liegt auf der Entwicklung von validierten muskuloskelettalen Körpermodellen mit dem übergeordneten Ziel, konsistente Szenarien der mechanischen Belastungen zu bestimmen, die auf alle belastungskonstitutiven Strukturen des menschlichen Körpers wirken. Zur Lösung dieser Aufgabe entwickeln wir den hauseigenen Code demoa, der ODEs löst und über Animationsfunktionen für muskelgesteuerte Systeme verfügt.
Eine weitere Besonderheit in diesem Track ist die Kopplung unserer Muskelmodellierungs- und Bewegungsgenerierungsmethoden mit kommerziell erhältlichen Finite-Elemente-Vollkörpermodellen (THUMS, GHBMC, VIVA OpenHBM), um deren validierte Bewertungsmöglichkeiten für die Automobil- und Ergonomieforschung zu nutzen. Der vereinheitlichende Ansatz in diesem Track ist unser Modellierungswerkzeug calcman, das ständig weiterentwickelt wird. Seine Merkmale sind ein umfassender Datensatz von Körperteilen einschließlich Materialeigenschaften, volle geometrische Skalierbarkeit und Ausgabeparser für verschiedene Simulationspakete.
Kooperationen und Finanzierung:
Unsere Arbeit wird durch das EU-Programm Horizon 2020, verschiedene Ministerien des Landes Baden-Württemberg und durch die Industrie gefördert. In unseren Projekten arbeiten wir mit Industriepartnern wie der Audi AG, Daimler AG, Mercedes-Benz Cars, Robert Bosch GmbH, Dr. Ing. h.c. F. Porsche AG, Volkswagen AG, ZF Friedrichshafen, Autoliv Deutschland und vielen anderen zusammen. Zu unseren Hochschulpartnern zählen die Ludwig-Maximilians-Universität München, die RWTH Aachen, die Technische Universität Graz und die Universität Straßburg. Im Projekt OSCCAR (Future Occupant Safety for Crashes in Cars) (http://osccarproject.eu/) arbeiten wir mit mehr als 18 Partnern aus der ganzen Welt zusammen.
Martynenko, O.; Neininger, F. T. & Schmitt, S.: Development of a Hybrid Muscle Controller for an Active Finite Element Human Body Model in LS-DYNA Capable of Occupant Kinematics Prediction in Frontal and Lateral Maneuvers. In: Proceedings of the 26th International Technical Conference on the Enhanced Safety of Vehicles (ESV)., 2019, S. 1--12
N. Brown, D. Bubeck, D. F. B. Häufle, J. Weickenmeier, E. Kuhl, W. Alt, and S. Schmitt. “Weekly Time Course of Neuro-Muscular Adaptation to Intensive Strength Training”. In: Frontiers in Physiology 8 (2017), p. 329. ISSN: 1664-042X. DOI: 10.3389/fphys.2017.00329
C. Kleinbach, O. Martynenko, J. Promies, D. F. B. Häufle, J. Fehr, and S. Schmitt. “Implementation and validation of the extended Hill-type muscle model with robust routing capabilities in LS-DYNA for active human body models”. In: BioMedical Engineering OnLine 16.1 (Sept. 2017), p. 109. ISSN: 1475-925X. DOI: 10.1186/s12938-017-0399-7
O. Roehrle, M. Sprenger, and S. Schmitt. “A two-muscle, continuum-mechanical forward simulation of the upper limb”. In: Biomechanics and Modeling in Mechanobiology 16(3) (2017), pp. 743–762. DOI: 10.1007/s10237-016-0850-x
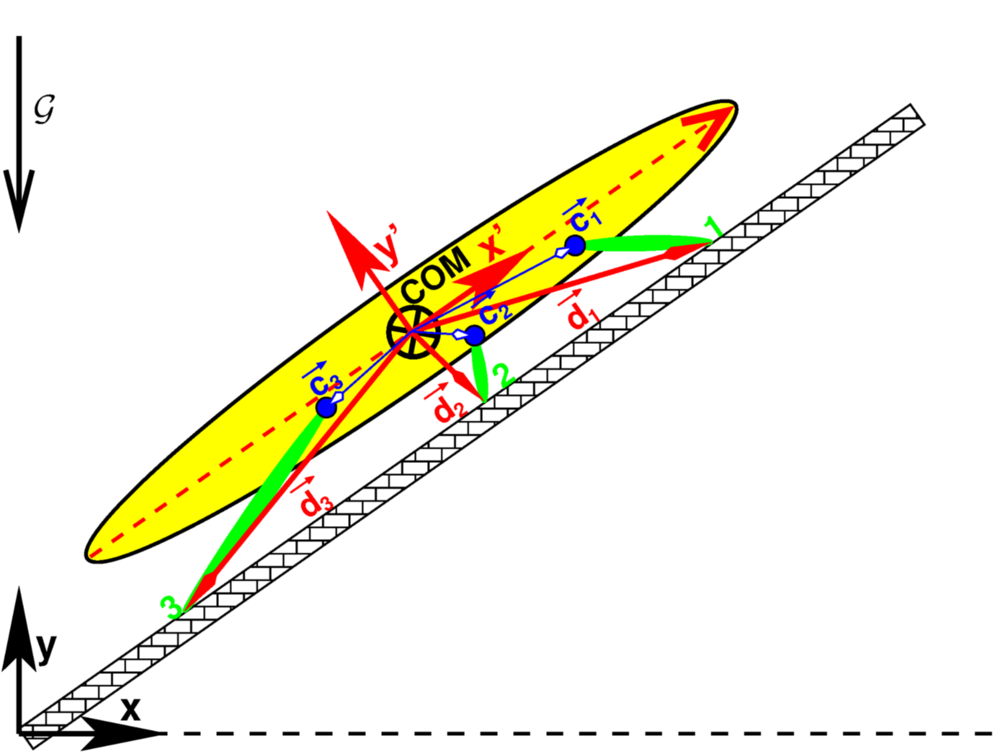
Die Evolution von Lebewesen wird durch stochastisch induzierte genetische Mutationen im Zusammenspiel mit den physikalischen Eigenschaften und Beschränkungen, die den Organismus bilden und umgeben, vorangetrieben. Dennoch bleiben Fragen offen, zumindest in Bezug darauf, welche Eigenschaften und Beschränkungen die wesentlichen sind - d. h. diejenigen, die das Phänomen des Lebens kausal erklären können. In diesem evolutionären Kontext der biologischen Fortbewegung haben wir reduktionistische biomechanische Modelle der Fortbewegung von Landtieren mit Beinen entwickelt. Im Laufe der Jahre haben wir uns mit mehreren Fragen beschäftigt: (i) Konstruktion von Drei-Segment-Beinen, (ii) Vorhersage der mechanischen Lastverteilung zwischen Beinen, die gleichzeitig ein Substrat berühren, (iii) Identifizierung möglicher Steuerungsparameter zur Maximierung von Substratneigungen relativ zur Schwerkraft, die von mehrbeinigen Tieren überwunden werden können, (iv) Untersuchung des Beitrags der Hydraulik zur Beinbetätigung (bei Spinnen), (v) die Wechselbeziehung zwischen den Lebensbedingungen in der Umwelt und den physiologischen Bedingungen, dem biomechanischen Körper-Bein-Design und den umweltspezifischen Lösungen für die Fortbewegung mit Beinen bei Gliederfüßern und (vi) die Ermittlung der geometrisch-anatomischen und muskelmechanischen Parameter eines Beins, die die maximale Laufgeschwindigkeit bei allen Tierarten und über die gesamte Bandbreite der Körpergrößen hinweg entscheidend bestimmen (Allometrie der Laufgeschwindigkeit). Siehe auch Computersynthese der menschlichen Bewegung.
Kooperationen und Finanzierung: Dieser Forschungsbereich wurde durch die Zusammenarbeit mit Reinhard Blickhan (Friedrich-Schiller-Universität, Jena) inspiriert, in dessen Forschungsgruppe einige von uns in ihren wissenschaftlichen Ansätzen einen deutlichen Schnitt und Schliff in unseren wissenschaftlichen Ansätzen erhalten haben. Die Kooperationspartner sind Tom Weihmann, Daniel Häufle und Robert Rockenfeller. Gefördert wurde das Projekt von der DFG (MU1766/1-3, SE1042/4-1, SI841/2-3, BL-236/14-1, WE4664/2-1, WE4664/5-1, EXC310/1,2, SCHM2392/5-1,2), der Deutschen Gesetzlichen Unfallversicherung (DGUV) und der Volkswagenstiftung (1/78 578).
M. Hammer, M. Günther, D. F. Häufle, and S. Schmitt. “Tailoring anatomical muscle paths: a sheath-like solution for muscle routing in musculo-skeletal computer models”. In: Mathematical Biosciences 311 (2019), pp. 68–81. DOI: 10.1016/j.mbs.2019.02.004
T. Weihmann, H. H. Goetzke, and M. Günther. “Requirements and limits of anatomy-based predictions of locomotion in terrestrial arthropods with emphasis on arachnids”. In: Journal of Paleontology 89.6 (2015), pp. 980–990. DOI: 10.1017/jpa.2016.33
S. W. Lipfert, M. Günther, D. Renjewski, and A. Seyfarth. “Impulsive ankle push-off powers leg swing in human walking”. In: The Journal of Experimental Biology 217.Pt 8 (2014). [with Correction], pp. 1218–1228. DOI: 10.1242/jeb.097345
M. Günther and T. Weihmann. “Climbing in hexapods: A plain model for heavy slopes”. In: Journal of Theoretical Biology 293 (2012), pp. 82–86. DOI: 10.1016/j.jtbi.2011.10.011
R. Blickhan, A. Seyfarth, H. Geyer, S. Grimmer, H. Wagner, and M. Günther. “Intelligence by mechanics”. In: Philosophical Transactions of the Royal Society A 365.1850 (2007), pp. 199–220. DOI: 10.1098/rsta.2006.1911
Bewegung hat in der Biologie viele Funktionen. Am wichtigsten ist, dass sie sich auf die evolutionäre Fitness der jeweiligen Art auswirkt. Die Vielfalt und Anpassungsfähigkeit an spezifische Bedürfnisse ist im gesamten Tierreich faszinierend, auch beim Menschen. Bei näherer Betrachtung scheint die biologische Bewegungskontrolle hierarchisch organisiert zu sein und wird durch eine geschichtete Struktur verschiedener Elemente und Teile gesteuert, nämlich Reflexschleifen, Rückenmark, Kleinhirn, motorischer Kortex usw. Wir versuchen, die Beiträge dieser einzelnen Teile zu verstehen, indem wir mithilfe biophysikalischer Modelle in Computersimulationen und mechanischen Experimenten im wirklichen Leben sinnvolle und beobachtbare Bewegungen synthetisieren.
Kooperationen und Finanzierung: Gefördert wurden wir von der Baden-Württemberg Stiftung Neurorobotik, dem Forschungsverbund "System Mensch" Tübingen-Stuttgart (Az: 33-7533.-30-20/7/2), der DFG (EXC310, EXC2075) und der DFG (GRK2198 "Soft Tissue Robotics"). Unsere Kooperationspartner sind Daniel Häufle (U Tübingen) und Matthias Müller (U Hannover).
S. Brändle, S. Schmitt, and M. A. Müller. “A systems-theoretic analysis of low-level human motor control: application to a single-joint arm model”. In: Journal of Mathematical Biology 80.4 (2020), pp. 1139–1158. DOI: 10.1007/s00285-019-01455-z
I. Wochner, D. Driess, H. Zimmermann, D. F. B. Häufle, M.Toussaint, and S. Schmitt. “Optimality Principles in Human Point-to-Manifold Reaching Accounting for Muscle Dynamics”. In: Frontiers in Computational Neuroscience 14 (2020), p. 38. DOI: 10.3389/fncom.2020.00038
D. F. B. Häufle, B. Schmortte, H. Geyer, R. Müller, and S. Schmitt. “The Benefit of Combining Neuronal Feedback and Feed-Forward Control for Robustness in Step Down Perturbations of Simulated Human Walking Depends on the Muscle Function”. In: Frontiers in Computational Neuroscience 12 (2018), p. 80. ISSN: 1662-5188. DOI: 10.3389/fncom.2018.00080
D. Suissa, M. Günther, A. Shapiro, I. Melzer, and S. Schmitt. “On Laterally Perturbed Human Stance: Experiment, Model, and Control.” In: Applied Bionics and Biomechanics (2018), p. 4767624. ISSN: 1176-2322. DOI: 10.1155/2018/4767624
A. Bayer, S. Schmitt, M. Günther, and D. Häufle. “The influence of biophysical muscle properties on simulating fast human arm movements”. In: Computer Methods in Biomechanics and Biomedical Engineering 20.8 (2017), pp. 803–821. DOI: 10.1080/10255842.2017.1293663
K. Ghazi-Zahedi, D. F. Häufle, G. Montúfar, S. Schmitt, and N. Ay. “Evaluating morphological computation in muscle and dc-motor driven models of hopping movements”. In: Frontiers in Robotics and AI 3 (2016), p. 42. DOI: 10.3389/frobt.2016.00042
M. Günther and H. Wagner. “Dynamics of quiet human stance: computer simulations of a triple inverted pendulum model”. In: Computer Methods in Biomechanics and Biomedical Engineering 19.8 (2016), pp. 819–834. DOI: 10.1080/10255842.2015.1067306
D. F. B. Häufle, M. Günther, G. Wunner, and S. Schmitt. “Quantifying control effort of biological and technical movements: An information-entropy-based approach”. In: Physical Review E 89 (1 2014), p. 012716. DOI: 10.1103/PhysRevE.89.012716
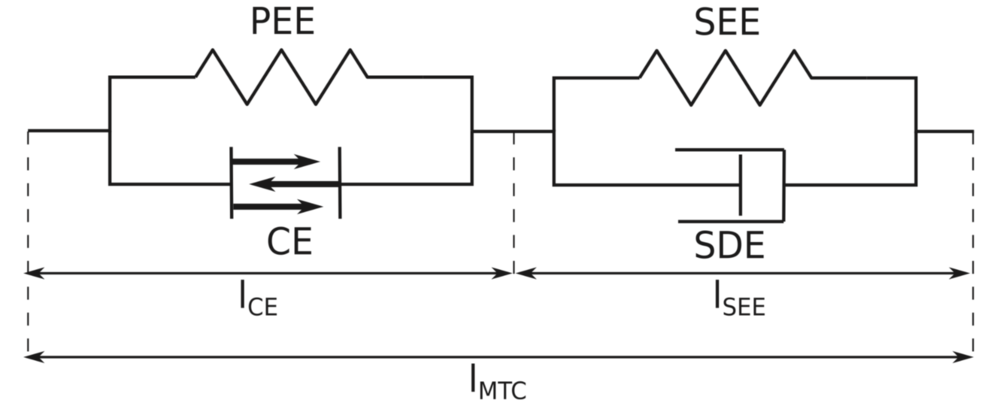
Seit der Pionierarbeit von H. Hatze (1976), der die Verwendung von Muskelmodellen des Hill-Typs in biomechanischen, neuro-muskulo-skelettalen Starrkörper-Computermodellen einführte, wird die Elastizität des Aponeurosen- und Sehnenmaterials in Form eines elastischen Kraftelements berücksichtigt, das in Reihe mit dem aktiv kontrahierenden Kraft-Geschwindigkeits-Element geschaltet ist, das die Eigenschaften des Fasermaterials gemäß der Hillschen Beziehung repräsentiert. Das Kräftegleichgewicht zwischen der aktiven Kraft-Geschwindigkeits-Relation - die auch von der Kraft-Längen-Relation und dem chemischen Zustand, d. h. der Aktivität des Fasermaterials, abhängt - und der Sehnenkraft ist der mechanische Kern eines jeden Muskelmodells nach Hill und bestimmt die Kontraktionsgeschwindigkeit des Muskels. Dieser mechanisch bestimmte Zusammenhang wird als "Kontraktionsdynamik" des Fasermaterials bezeichnet. Die Kontraktionsdynamik der Muskelfasern ist eng mit der elektrochemischen Dynamik der sich ändernden Faseraktivität, d. h. der Aktivierungsdynamik, gekoppelt. Wir konzentrieren uns auf die Einbeziehung faserinterner physiologischer Prozesse wie Ermüdung, die durch verschiedene Mechanismen verursacht wird, und Myosin-Titin-Actin-Wechselwirkungen, die historische Effekte bei der Krafterzeugung hervorrufen.
Da Hill-Muskelmodelle einen Kernbestandteil unserer biophysikalischen Computermodelle von Körperbewegungen darstellen und darüber hinaus auch als Blaupausen für reale künstliche Muskeln in der Biorobotik dienen, haben wir an der Verbesserung von Hill-Muskelmodellen gearbeitet. Zum Beispiel haben wir ein Modell der mechanischen Dämpfung innerhalb der Aponeurose/Sehne hinzugefügt, die in Hill-Modellen seither als ideal elastisch angenommen wurde. Auch einige Zustandsabhängigkeiten der Parameter der Hill-Relation, die ursprünglich als Konstanten angenommen worden waren, wurden neu formuliert. Darüber hinaus haben wir sowohl die elektromechanische Verzögerung - d. h. Kraftänderungen als Reaktion auf Änderungen des neuronalen Stimulationsinputs in das Modell - als auch die Merkmale der Kraft-Längen-Beziehung der Fasern und ihre Auswirkungen auf Bewegungssimulationen untersucht, und unser "Arbeitspferd" Hill-Muskelmodell wurde so ausgefeilt, dass es für jeden kontraktilen Zustand, einschließlich der Dehnung der Fasern (d. h. exzentrisches Arbeiten), gut funktioniert.
Außerdem haben wir ein sehr reduziertes Muskelmodell entwickelt, das aus nur vier Kraftelementen besteht, die die mechanische Grundstruktur einer einzelnen Querbrücke darstellen. Das Modell kann sowohl die mechanische Leistung und die Wärmeabgabe während konzentrischer, gleichmäßiger Kontraktionen des Skelettmuskels als auch frühe Reaktionen auf schnelle Schritte in der Muskellänge oder Kraft erklären. Ein wesentlicher Teil der Erkenntnisse, die durch diesen Modellansatz ermöglicht werden, besteht erstens darin, dass nur zwei Modellparameter frei gewählt werden können, um die in den nicht-stationären Reaktionen auf schnelle Sprünge gemessenen Eigenschaften anzupassen, während die anderen sechs Parameter das Wissen aus der Literatur widerspiegeln, einschließlich der mikroskopischen Querbrückengeometrie und der Kraftcharakteristika, die darauf hindeuten, dass die Coulomb-Abstoßung zwischen verschiedenen Querbrückenbereichen der elementare Antrieb ist. Zweitens lassen sich die makroskopischen, stationären Eigenschaften kontrahierender Muskelfasern (Hill'sche Kraft-Geschwindigkeits-Relation) aus genau demselben Modell ableiten, wobei (i) die Kraft einfach von der Querbrückenebene hochskaliert wird, (ii) angenommen wird, dass die ATP-Hydrolyse in stationären Zuständen zu (einem der beiden) Dämpfungs(koeffizienten) als zweiten dissipativen Prozess neben der passiven Reibung hinzufügt, und (iii) den Beitrag der faserinternen Elastizität zur externen Kontraktionsgeschwindigkeit als einen von nur zwei freien Parametern verwendet, um die stationären Eigenschaften anzupassen.
Kooperationen und Finanzierung: Unsere Partner sind Tobias Siebert (U Stuttgart) und Robert Rockenfeller (Universität Koblenz-Landau). Dieser Forschungszweig wurde von der DFG (MU1766/1-1,2,3, BL236/11-1, SI841/2-3, EXC310/1,2, SCHM2392/5-1,2, EXC2075), dem Land Baden-Württemberg (Az: 33-7533.-30-20/7/2) und der Berufsgenossenschaft Nahrungsmittel und Gastgewerbe (BGN, Mannheim, Deutschland) unterstützt.
M. Günther, D. F. Häufle, and S. Schmitt. “Corrigendum to “The basic mechanical structure of the skeletal muscle machinery: One model for linking microscopic and macroscopic scales” [Journal ofTheoretical Biology 456 (2018) 137–167]”. In: Journal ofTheoretical Biology 488 (2020), p. 110143. DOI: 10.1016/j.jtbi.2019.110143
D. F. B. Häufle, J. Siegel, S. Hochstein, A. Gussew, S. Schmitt, T. Siebert, R. Rzanny, J. R. Reichenbach, and N. Stutzig. “Energy expenditure of dynamic submaximal human plantarflexion movements: model prediction and validation by in-vivo magnetic resonance spectroscopy”. In: Frontiers in Bioengineering and Biotechnology 8.622 (2020).
R. Rockenfeller, M. Günther, N. Stutzig, D. F. B. Häufle, T. Siebert, S. Schmitt, K. Leichsenring, M. Böl, and T. Götz. “Exhaustion of skeletal muscle fibers within seconds: incorporating phosphate kinetics into a Hill-type model”. In: Frontiers in Physiology 11 (2020), p. 306. DOI: 10.3389/fphys.2020.00306 .
S. Schmitt, M. Günther, and D. F. B. Häufle. “The dynamics of the skeletal muscle: A systems biophysics perspective on muscle modeling with the focus on Hill-type muscle models”. In: GAMM-Mitteilungen 0 (2019), e201900013. ISSN: 0936-7195. DOI: 10.1002/gamm.201900013 .
M. Günther, D. F. Häufle, and S. Schmitt. “The basic mechanical structure of the skeletal muscle machinery: One model for linking microscopic and macroscopic scales”. In: Journal of Theoretical Biology 456 (2018), pp. 137–167. ISSN: 0022-5193. DOI: 10. 1016 / j.jtbi.2018.07.023 .
R. Rockenfeller and M. Günther. “Inter-filament spacing mediates calcium binding to troponin: A simple geometric-mechanistic model explains the shift of force-length maxima with muscle activation”. In: Journal of Theoretical Biology 454 (2018), pp. 240–252. DOI: 10.1016/j.jtbi.2018.06.009 .
R. Rockenfeller and M. Günther. “Hill equation and Hatze’s muscle activation dynamics complement each other: enhanced pharmacological and physiological interpretability of modelled activity-pCa curves”. In: Journal of Theoretical Biology 431 (2017), pp. 11–24. DOI:10.1016/j.jtbi.2017.07.023 .
R. Rockenfeller and M. Günther. “How to model a muscle’s active force-length relation: A comparative study”. In: Computer Methods in Applied Mechanics and Engineering 313 (2017), pp. 321–336. DOI: 10.1016/j.cma.2016.10.003 .
R. Rockenfeller, M. Günther, S. Schmitt, and T. Götz. “Corrigendum to Comparative Sensitivity Analysis of Muscle Activation Dynamics”. In: Computational and Mathematical Methods in Medicine 2017 (2017), p. 2.
R. Rockenfeller and M. Günther. “Extracting low-velocity concentric and eccentric dynamic muscle properties from isometric contraction experiments”. In: Mathematical Biosciences 278 (2016). [with Corrigendum], pp. 77–93. DOI: 10.1016/j.mbs.2016.06.005 .
R. Rockenfeller, M. Günther, S. Schmitt, and T. Götz. “Comparative sensitivity analysis of muscle activation dynamics”. In: Computational and Mathematical Methods in Medicine (2015). [with Corrigendum], 585409 (16pp). DOI: 10.1155/2015/585409 .
D. F. B. Häufle, M. Günther, A. Bayer, and S. Schmitt. “Hill-type muscle model with serial damping and eccentric force-velocity relation”. In: Journal of Biomechanics 47.6 (2014), pp. 1531–1536. DOI: 10.1016/j.jbiomech.2014.02.009 .
E. V. Rosenfeld and M. Günther. “An enhanced model of cross-bridge operation with internal elasticity”. In: European Biophysics Journal 43.4-5 (2014), pp. 131–141. DOI: 10.1007/s00249-014-0947-z .
M. Günther and S. Schmitt. “A macroscopic ansatz to deduce the Hill relation”. In: Journal of Theoretical Biology 263.4 (2010), pp. 407–418. DOI: 10.1016/j.jtbi.2009.12.027 .
M. Günther, S. Schmitt, and V. Wank. “High-frequency oscillations as a consequence of neglected serial damping in Hill-type muscle models”. In: Biological Cybernetics 97.1 (2007), pp. 63–79. DOI: 10.1007/s00422-007-0160-6 .
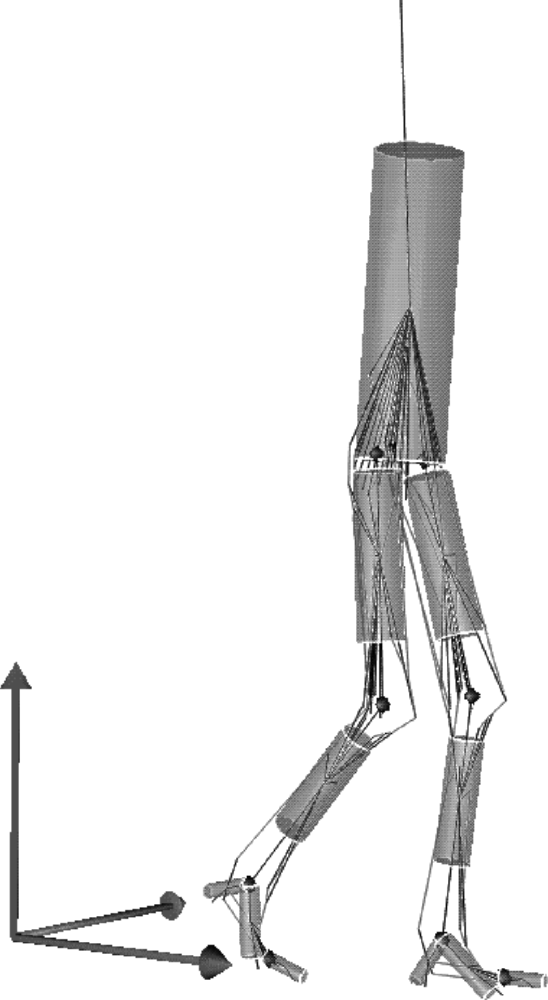
Dieser Forschungszweig ist einer unserer ältesten und geht auf die Anfänge an der Universität Tübingen, Prof. Hanns Ruder, zurück. Die Realisierung von rein synthetischen, dynamisch stabilen neuro-muskulo-skelettalen Computersimulationen des menschlichen Gehens in zwei Dimensionen (2d; in der Sagittalebene) kann als erster, messbarer Erfolg angesehen werden. Obwohl ein Zwischenschritt in Richtung dreidimensionaler (3d) Gehsimulationen mit Hilfe eines robotischen (drehmomentgesteuerten) Ansatzes gemacht wurde, ist der große Schritt hin zu einem ausschließlich muskelgesteuerten neuro-muskulo-skelettalen 3d-Modell des Menschen für die reine Computersynthese von Gehbewegungen noch nicht gemacht worden. In der Zwischenzeit haben wir jedoch eine Menge biomechanisches Wissen sowie Modellierungserfahrung und absolut notwendige Computermodell-Werkzeuge und -Strukturen angesammelt: Wir haben das Problem der Muskelführung in 3D gelöst, wir verbessern gekoppelte Modelle der Muskelkontraktion und -aktivierung, und wir haben entscheidende Charakteristika der menschlichen Gehdynamik experimentell untersucht, all dies oft in Kooperationen mit langjährigen Historien. Es ist daher sehr wahrscheinlich, dass wir in den nächsten Jahren den großen Schritt zu einem 3d-Computermodell machen werden.
Kooperationen und Finanzierung: Wir wurden von der DFG gefördert (EXC310/1,2, EXC2075). Unsere Partner waren im Laufe der Jahre Susanne Lipfert und Daniel Renjewski (beide TU München) und Robert Rockenfeller (Universität Koblenz-Landau). Arnim Henze entwickelte den Vorläufer 'dysim' unseres hauseigenen Simulationscodes 'demoa' und wurde, betreut von Hanns Ruder (Theoretische Astrophysik, Tübingen), durch seine Doktorarbeit gefördert, in der er zeigte, wie man 3d-Walking durch Drehmomentantriebe simulieren kann, basierend auf dem Robotersteuerungsansatz 'Virtual Model Control (VMC)'.
M. Hammer, M. Günther, D. F. Häufle, and S. Schmitt. “Tailoring anatomical muscle paths: a sheath-like solution for muscle routing in musculo-skeletal computer models”. In: Mathematical Biosciences 311 (2019), pp. 68–81. DOI: 10.1016/j.mbs.2019.02.004
A. Bayer, S. Schmitt, M. Günther, and D. Häufle. “The influence of biophysical muscle properties on simulating fast human arm movements”. In: Computer Methods in Biomechanics and Biomedical Engineering 20.8 (2017), pp. 803–821. DOI: 10.1080/10255842.2017.1293663
T. K. Rupp, W. Ehlers, N. Karajan, M. Günther, and S. Schmitt. “A forward dynamics simulation of human lumbar spine flexion predicting the load sharing of intervertebral discs, ligaments, and muscles”. In: Biomechanics and Modeling in Mechanobiology 14.5 (2015), pp. 1081–1105. DOI: 10.1007/s10237-015-0656-2
Zur Ontogenese gehören auch Anpassung und Lernen. Biologische Systeme nutzen ihre eigenen Körpereigenschaften und Umweltinteraktionen jeglicher Art. Die Interdependenz zwischen physischer Zustandsabhängigkeit und zentralnervösen Bahnen ist auch heute noch Nährboden für moderne Forschung. Wir verwenden eine systemdynamische Perspektive auf den biologischen Organismus und konzentrieren uns auf den Lernprozess zur Erzeugung sinnvoller Bewegung. Wir haben gezeigt, dass es möglich ist, künstliche Lerntechniken anzuwenden und zu entwickeln, um bestimmte Bewegungsaufgaben zu bewältigen. Wir fragen nach der Generalisierung des Lernens in der Interaktion mit der Umwelt und der Körperstruktur. Dabei hilft die angenommene Optimalität der biologischen Bewegung bei der Bewertung technischer Lösungen.
Kooperationen und Finanzierung: Gefördert wurden wir von der Baden-Württemberg Stiftung Neurorobotik, dem Forschungsverbund "System Mensch" Tübingen-Stuttgart (Az: 33-7533.-30-20/7/2) und der DFG (EXC310, EXC2075). Unsere Kooperationspartner sind Marc Toussaint (TU Berlin), Daniel Häufle (U Tübingen), und Alexander Spröwitz (MPI Stuttgart).
I. Wochner, D. Driess, H. Zimmermann, D. F. B. Häufle, M.Toussaint, and S. Schmitt. “Optimality Principles in Human Point-to-Manifold Reaching Accounting for Muscle Dynamics”. In: Frontiers in Computational Neuroscience 14 (2020), p. 38. DOI: 10.3389/fncom.2020.00038 .
D. Suissa, M. Günther, A. Shapiro, I. Melzer, and S. Schmitt. “On Laterally Perturbed Human Stance: Experiment, Model, and Control.” In: Applied Bionics and Biomechanics (2018), p. 4767624. ISSN: 1176-2322. DOI: 10.1155/2018/4767624 .
D. Driess, S. Schmitt, and M. Toussaint. “Active Inverse Model Learning With Error and Reachable Set Estimates”. In: 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2019, pp. 1826–1833. DOI: 10.1109/IROS40897.2019.8967858 .
D. Driess, H. Zimmermann, S. Wolfen, D. Suissa, D. Haäufle, D. Hennes, M. Toussaint, and S. Schmitt. “Learning to Control Redundant Musculoskeletal Systems with Neural Networks and SQP: Exploiting Muscle Properties”. In: 2018 IEEE International Conference on Robotics and Automation (ICRA). 2018, pp. 6461–6468. DOI: 10.1109/ICRA.2018.8463160 .
K. Ghazi-Zahedi, D. F. Häufle, G. Montúfar, S. Schmitt, and N. Ay. “Evaluating morphological computation in muscle and dc-motor driven models of hopping movements”. In: Frontiers in Robotics and AI 3 (2016), p. 42. DOI: 10.3389/frobt.2016.00042 .
D. F. B. Häufle, M. Günther, G. Wunner, and S. Schmitt. “Quantifying control effort of biological and technical movements: An information-entropy-based approach”. In: Physical Review E 89 (1 2014), p. 012716. DOI: 10.1103/PhysRevE.89.012716 .
Roboter sind unter vielen Gesichtspunkten attraktiv. Wir bauen Roboter, um unsere Computermodule zu validieren, um unsere Theorie im wirklichen Leben zu sehen und um ein echtes System in der Hand zu haben. Bei rechnerischen Ansätzen sieht die Lösung eines schwierigen Problems manchmal einfach aus, ist aber technisch mit der vorhandenen Technologie nicht machbar. Der Bau physikalischer Modelle stellt die Evolution vor zusätzliche Herausforderungen, die oft gelöst werden. In den letzten Jahren haben wir uns darauf konzentriert, physikalische Modelle von biologischen Muskeln zu bauen und diese mit einem künstlichen Skelett zu verbinden, um Bein- und Armroboter zu bauen.
Kooperationen und Finanzierung: Gefördert wurden wir von der Baden-Württemberg Stiftung Neurorobotik, dem Forschungsverbund "System Mensch" Tübingen-Stuttgart (Az: 33-7533.-30-20/7/2) und der DFG (EXC310, EXC2075). Unsere Kooperationspartner sind Marc Toussaint (TU Berlin), Daniel Häufle (U Tübingen), und Alexander Spröwitz (MPI Stuttgart).
D. Driess, H. Zimmermann, S. Wolfen, D. Suissa, D. Häufle, D. Hennes, M. Toussaint, and S. Schmitt. “Learning to Control Redundant Musculoskeletal Systems with Neural Networks and SQP: Exploiting Muscle Properties”. In: 2018 IEEE International Conference on Robotics and Automation (ICRA). 2018, pp. 6461–6468. DOI: 10.1109/ICRA.2018.8463160 .
S. Wolfen, J. Walter, M. Günther, D. F. B. Häufle, and S. Schmitt. “Bioinspired pneumatic muscle spring units mimicking the human motion apparatus: benefits for passive motion range and joint stiffness variation in antagonistic setups”. In: 2018 25th International Conference on Mechatronics and Machine Vision in Practice (M2VIP). 2018, pp. 1–6. DOI: 10.1109/M2VIP.2018.8600913 .
D. F. B. Häufle, M. Günther, R. Blickhan, and S. Schmitt. “Can quick release experiments reveal the muscle structure? A bionic approach”. In: Journal of Bionic Engineering 9.2 (2012), pp. 211–223. DOI: 10.1016/S1672-6529(11)60115-7.
D. F. B. Häufle, M. Günther, R. Blickhan, and S. Schmitt. “Proof of concept: model based bionic muscle with hyperbolic force-velocity relation”. In: Applied Bionics and Biomechanics 9.3 (2012), pp. 267–274. DOI: 10.3233/ABB-2011-0052 .
D. F. B. Häufle, M. D. Taylor, S. Schmitt, and H. Geyer. “A clutched parallel elastic actuator concept: Towards energy efficient powered legs in prosthetics and robotics”. In: 2012 4th IEEE RAS EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob). 2012, pp. 1614–1619. DOI: 10.1109/BioRob.2012.6290722.
S. Schmitt, D. F. B. Häufle, R. Blickhan, and M. Günther. “Nature as an engineer: one simple concept of a bio-inspired functional artificial muscle”. In: Bioinspiration & Biomimetics 7.3 (2012), 036022 (9pp). DOI: 10.1088/1748-3182/7/3/036022 .
Die menschliche (und tierische) Wirbelsäule ist ein Teilorganismus des gesamten Körpers, der eine entscheidende mechanische Struktur des Skeletts eines jeden Körpers darstellt. Obwohl die Wirbelsäule seit langem ein Schwerpunkt in der Gesundheitsforschung ist, sind die grundlegenden physikalischen Wechselwirkungen (unabhängig von allen anderen ungeklärten Phänomenen, z. B. in der Mikrobiologie) noch immer nur teilweise bekannt oder unbekannt. So ist z. B. der Beitrag der Wirbelsäulenbänder bei Lebewesen zur passiven und aktiven Rumpfstabilisierung auch heute noch nicht vollständig geklärt. Wir konzentrieren uns auf einen reduzierten Ansatz für die Wirbelsäulenmechanik und untersuchen die nichtlineare Dynamik von bedeutenden lasttragenden Strukturen dieses Teilorganismus. Die physikalischen Zustandsabhängigkeiten, die Aktoren und die Sensordynamik werden zusammen mit dem vorhandenen zentralnervösen Feedback und den motorischen Befehlen verwendet, um ein vollständig dynamisches, gekoppeltes biologisches System zu modellieren. Dennoch streben wir danach, abstrakte Mehrkörperansätze mit geometrisch detaillierter Finite-Elemente-Beschreibung zu verschmelzen, um die Vorteile beider Welten in einem Modellierungs- und Simulationsansatz zu nutzen.
Kooperationen und Finanzierung: Gefördert wurden wir von der DFG (EXC310/1,2, EXC2075), dem DAAD, der Deutschen Gesetzlichen Unfallversicherung und ARC. Kooperationspartner sind Falk Moerl (APZ Erfurt), Brigitte Benda-Schäfer (Stuttgart), Farzam Vazifehdan (Diakonieklinikum Stuttgart) und Peter Pivonka und Paige J. Little (Biomechanics and Spine Research Group at QUT / Brisbane, Australien).
B. Haasdonk, T. Wenzel, G. Santin, and S. Schmitt. Biomechanical surrogate modelling using stabilized vectorial greedy kernel methods. 2020. arXiv: 2004.12670 [math.NA] .
F. Mörl, M. Günther, J. M. Riede, M. Hammer, and S. Schmitt. “Loads distributed in vivo among vertebrae, muscles, spinal ligaments, and intervertebral discs in a passively flexed lumbar spine”. In: Biomechanics and Modeling in Mechanobiology (published online) (2020). DOI: 10.1007/s10237-020-01322-7 .
T. K. Rupp, W. Ehlers, N. Karajan, M. Günther, and S. Schmitt. “A forward dynamics simulation of human lumbar spine flexion predicting the load sharing of intervertebral discs, ligaments, and muscles”. In: Biomechanics and Modeling in Mechanobiology 14.5 (2015), pp. 1081–1105. DOI: 10.1007/s10237-015-0656-2 .
N. Karajan, O. Röhrle, W. Ehlers, and S. Schmitt. “Linking continuous and discrete intervertebral disc models through homogenisation”. In: Biomechanics and Modeling in Mechanobiology 12.3 (June 2013), pp. 453–466. ISSN: 1617-7940. DOI: 10.1007/s10237-012-0416-5 .
Die biologische Fortbewegung wird durch Skelettmuskeln angetrieben. Die Muskelmassen sind nachgiebig am Skelett aufgehängt. Jedes (menschliche oder tierische) Bein, das beim Laufen, Springen oder Hüpfen auf den Boden aufschlägt, und jede Gliedmaße, die gegen etwas boxt, schlägt oder stößt, löst Stoßwellen aus, die durch die Gliedmaße und den Körper laufen. Diese durch den Aufprall verursachten, gedämpften Schwingungen überlagern auch die treibenden Muskelkontraktionen selbst. Bis heute wurde bei der Modellierung von Muskeln weitgehend vernachlässigt, dass die Muskelfasern eines anatomisch intakten, in-vivo, in-situ und in-motu Muskels normalerweise gegen ihre eigene Massenträgheit kontrahieren müssen. Dementsprechend sind die modernen Muskelmodelle zur Beschreibung der Muskelkontraktion in einer mathematischen Sprache erster Ordnung ausgedrückt: Sie bestehen aus gewöhnlichen Differentialgleichungen erster Ordnung. Wenn die Massenträgheit berücksichtigt wird, sind die Gleichungen, die die Dynamik der Muskelkontraktion beschreiben, von zweiter Ordnung, d. h. sie haben regelmäßig mechanischen Charakter.
Auf diesem Forschungsweg haben wir erstens die Trägheit auf einfache Weise eingeführt, indem wir klassische Modellelemente vom Typ Hill (siehe anderer Forschungsweg) mit gleichmäßig zwischen ihnen verteilten Punktmassen interagieren ließen und in numerischen Computerexperimenten die kontraktile Reaktion bei dynamischen Kontraktionen eines maximal aktivierten Muskels untersuchten, bei dem eines seiner Enden frei ist. Zweitens haben wir in einer kürzlich durchgeführten Studie gezeigt, dass die Trägheit des Muskels wahrscheinlich genau die biomechanische Eigenschaft ist, die die von größeren Tieren (wie dem Menschen) bei der terrestrischen Fortbewegung auf Beinen erreichbare Höchstgeschwindigkeit entscheidend begrenzt (siehe auch "Menschliche und tierische Fortbewegung").
Kooperationen und Finanzierung: Dieser Forschungszweig wurde von der DFG gefördert (EXC310/1,2, SI841/2-3, SCHM2392/5-1,2). Kooperationspartner sind Tobias Siebert (U Stuttgart).
K. B. Christensen, M. Günther, S. Schmitt, and T. Siebert. “Strain in shock-loaded skeletal muscle and the time scale of muscular wobbling mass dynamics”. In: Scientific Reports 7 (2017), 13266 (11pp). DOI: 10.1038/s41598-017-13630-7.
M. Günther, D. F. B. Häufle, O. Röhrle, and S. Schmitt. “Spreading out muscle mass within a Hill-type model: A computer simulation study”. In: Computational and Mathematical Methods in Medicine (2012), 848630 (13pp). DOI: 10.1155/2012/848630 .
S. Schmitt and M. Günther. “Human leg impact: energy dissipation of wobbling masses”. In: Archive of Applied Mechanics 81.7 (2011), pp. 887–897. DOI: 10.1007/s00419-010-0458-z .

Christine Schreiber
Institutsmitarbeiterin (Gruppe Schmitt)